
Filippo Samorì
Automation Engineer
Download CVAbout
My name is Filippo Samorì. I'm a Master’s student in Automation Engineering at the University of Bologna. I'm a passionate student with a strong interest in robotics and automation. I'm always looking for new opportunities to apply my knowledge and skills in real-world projects.
Education
Master’s degree in Automation Engineering
University of Bologna | 2023 - 2026
110 cum laude - Thesis: Enhancing Human-Robot Collaboration
through Projected Augmented Reality and
Reactive Motion Planning
Bachelor’s degree in Automation Engineering
University of Bologna | 2020 - 2023
110 cum laude - Thesis: Modelling and Simulation
of an
Excavator Arm
Electrical High School Diploma
I.T.T.S G. Marconi | 2015 - 2020
100 cum laude
Hard Skills

Experience
Robotics Research Intern
Eurecat, Barcelona, Spain | Oct 2025 - Feb 2026
Working on a collaborative cell for human-robot interaction, enhanced with projected augmented reality. My role involves implementing a dynamic planner using the MoveIt Framework in ROS 2 for a robotic arm, as well as building a projection framework to visualize robot trajectories and additional information.
Librarian
Communication Science Library, Bologna, Italy | Jan 2024 - Dec 2024
Circulation desk, overseeing book check-outs, returns, and reservations.
R&D Intern
Romagnatech, Forlì, Italy | July 2019 - Aug 2019
Conducted research and contributed to the development of an electric scooter.
R&D Intern
Robotikos Mokykla, Vilnius, Lithuania | Oct 2018 - Nov 2018
Erasmus Internship. Developed a smart wardrobe where kids could store their laptops.
Projects
Projected Augmented Reality and Reactive Motion Planning

Project realized at Eurecat during my robotics research internship. It involved developing a Projected Augmented Reality (PAR) framework to display real-time information in the robot's workspace, such as end-effector trajectories, highlighted objects, and task instructions. Additionally, I explored the MoveIt Hybrid Planning framework, developing custom plugins that enabled a seamless transition from simulation to the physical robot, resolving several limitations present in the official plugins.
Colorization with Deep Learning

Implemented a colorization algorithm using TensorFlow. Designed and trained a Deep Neural Network based on a U-Net architecture to colorize grayscale images.
View CodeSLAM in a Crazyflie drone using ORB_SLAM3
Implemented a SLAM algorithm on a Crazyflie drone using ORB_SLAM3. The architecture consisted of a server running ROS 2 with ORB_SLAM3 and the drone transmitting data via Bluetooth and Wi-Fi, achieving real-time performance.
View CodeUR5 Digital Twin
Universal Robot 5 modelling and simulation using 20-sim. The model was developed using a modular architecture based on bond graphs. Implemented a control law to operate the robot and validate simulation behavior.
View CodeHuman Detection and Localization
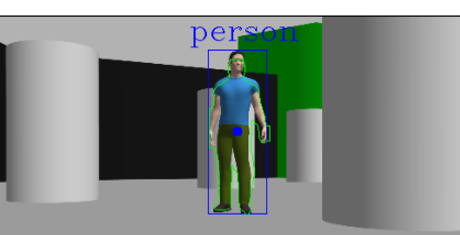
A project focused on detecting and localizing humans during robotic exploration. Used YOLOv11 for detection and an Extended Kalman Filter for localization.
View CodeTiago robot simulation

Simulation of the Tiago robot in Gazebo. The project involved using the ready to use simulation environment provided by the unversity and implementing a simple task using ROS 2. The robot was able to navigate in the environment using the ROS 2 Navigation Stack and to perform a pick and place of cubes detected using fiducial markers. The motion planning was implemented using the MoveIt Framework.
View CodeOptimal control of an under-actuated 2 dof robotic arm
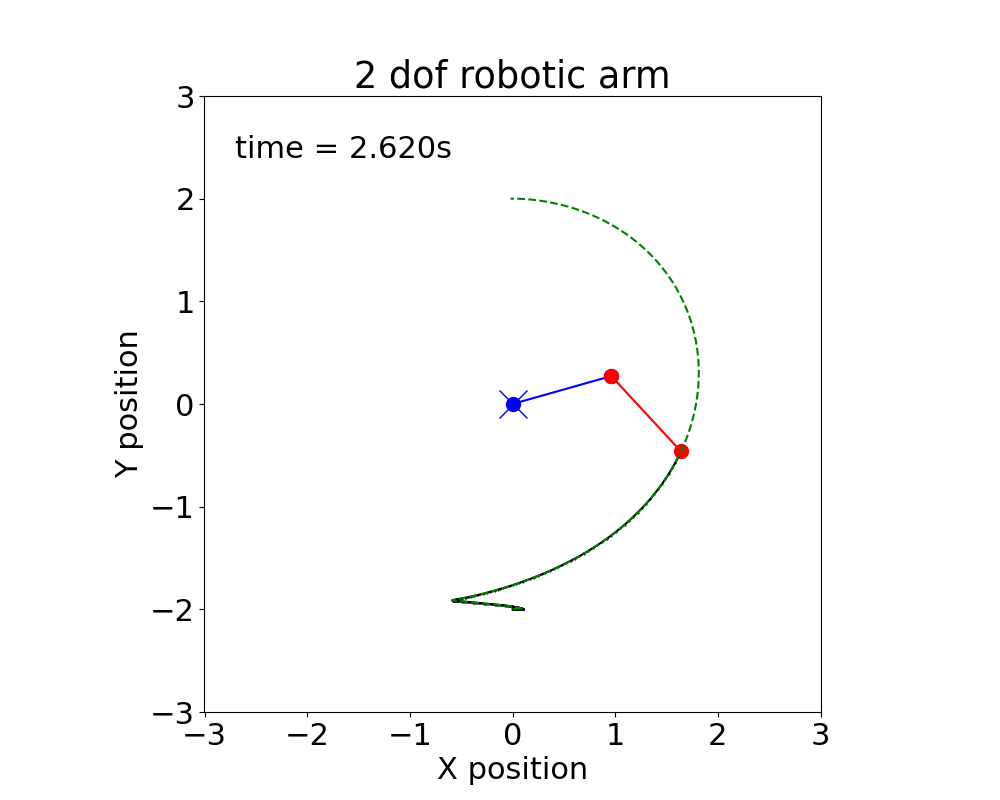
Project realized during the optimal control course at University of Bologna. The project involved developing the optimization algorithm for planning trajectories for a 2 dof robotic arm (double pendulum) with no actuation in the second joint. Newton's method and LQR has been developed inside the project.
View CodeSmart&Hack Hackaton - Concept for a smart water meter

Project realized during a 24h hackaton together with Natalie Morandi. The idea was to create a smart water meter integrating IoT technology to monitor water usage and provide real-time data to the user, enabling also predictive maintenance for the water supply system.
Download ProjectBarcode detection algorithm
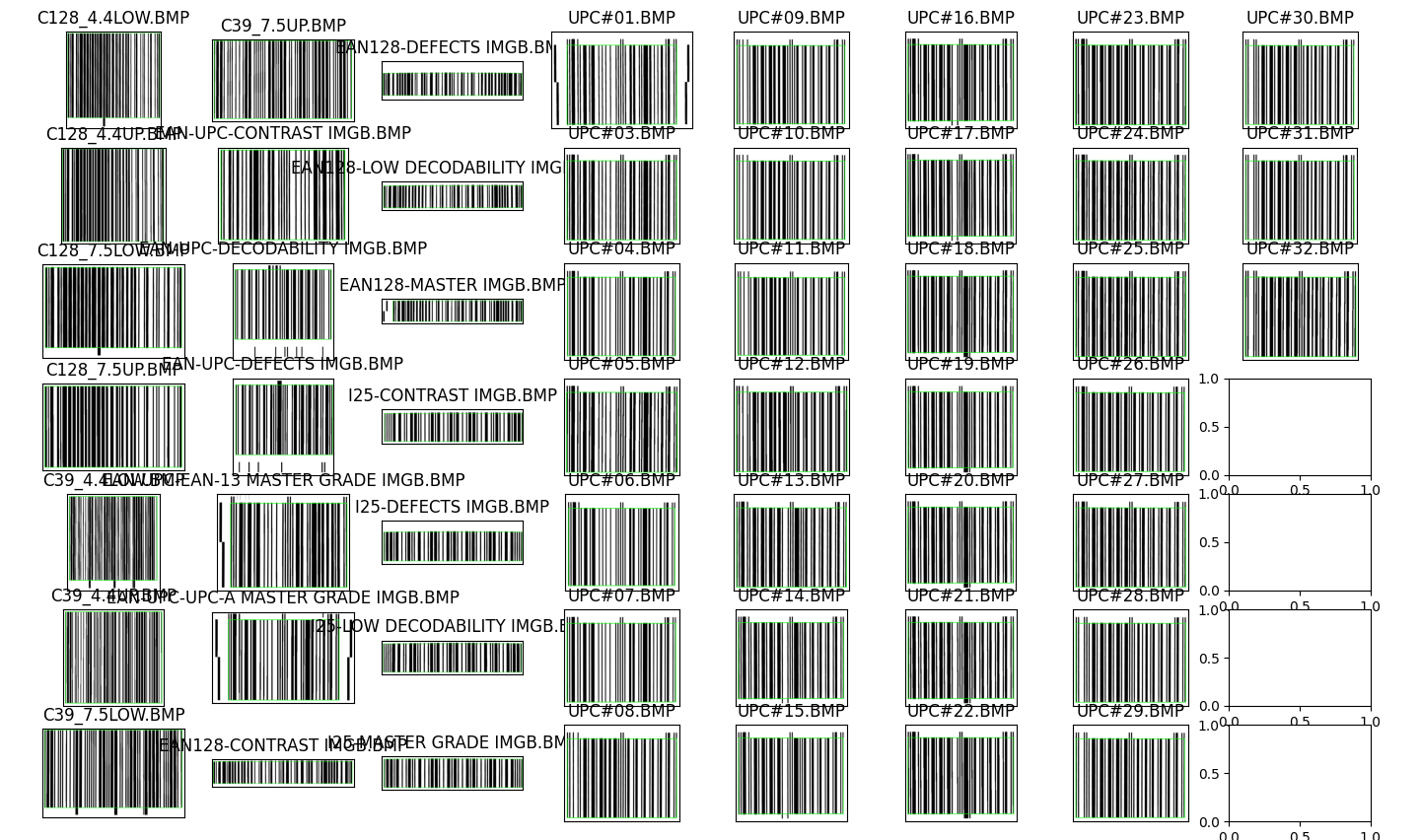
Project realized during the computer vision course at University of Bologna. The project involved developing an algorithm for barcode detection using standard computer vision approaches. The dataset was a black and white set of images.
View CodeSnake game in the terminal
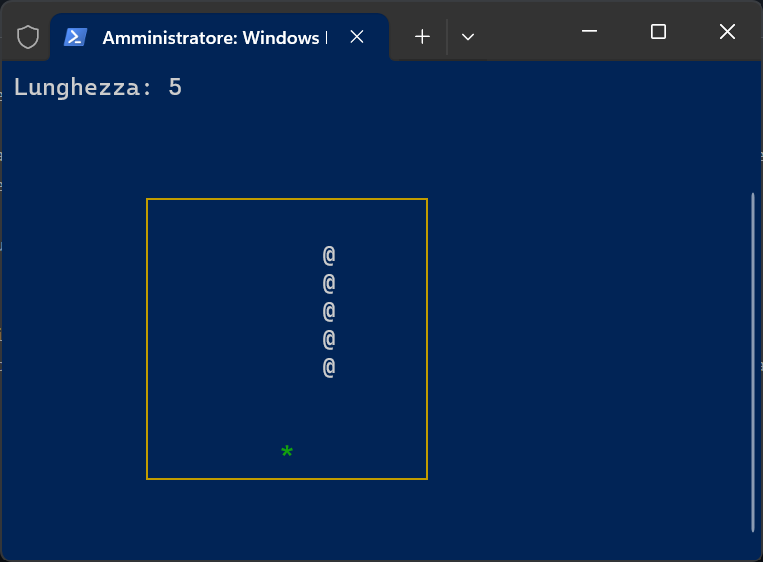
Small project realized for fun. The game is a simple implementation of the classic Snake game, playable in the terminal. It was developed in C and uses only terminal features for the GUI.
View CodeSun-tracking solar panel

Project realized by a team of six during my fourth year of high school. Developed in collaboration with Fores Engineering, the project involved creating a sun-tracking solar panel. Together with my classmates from the electronics course, we implemented the logic and the circuitry. We used Arduino and designed a custom expansion board to connect the sensors. We won first place.
Automatic greenhouse with Arduino
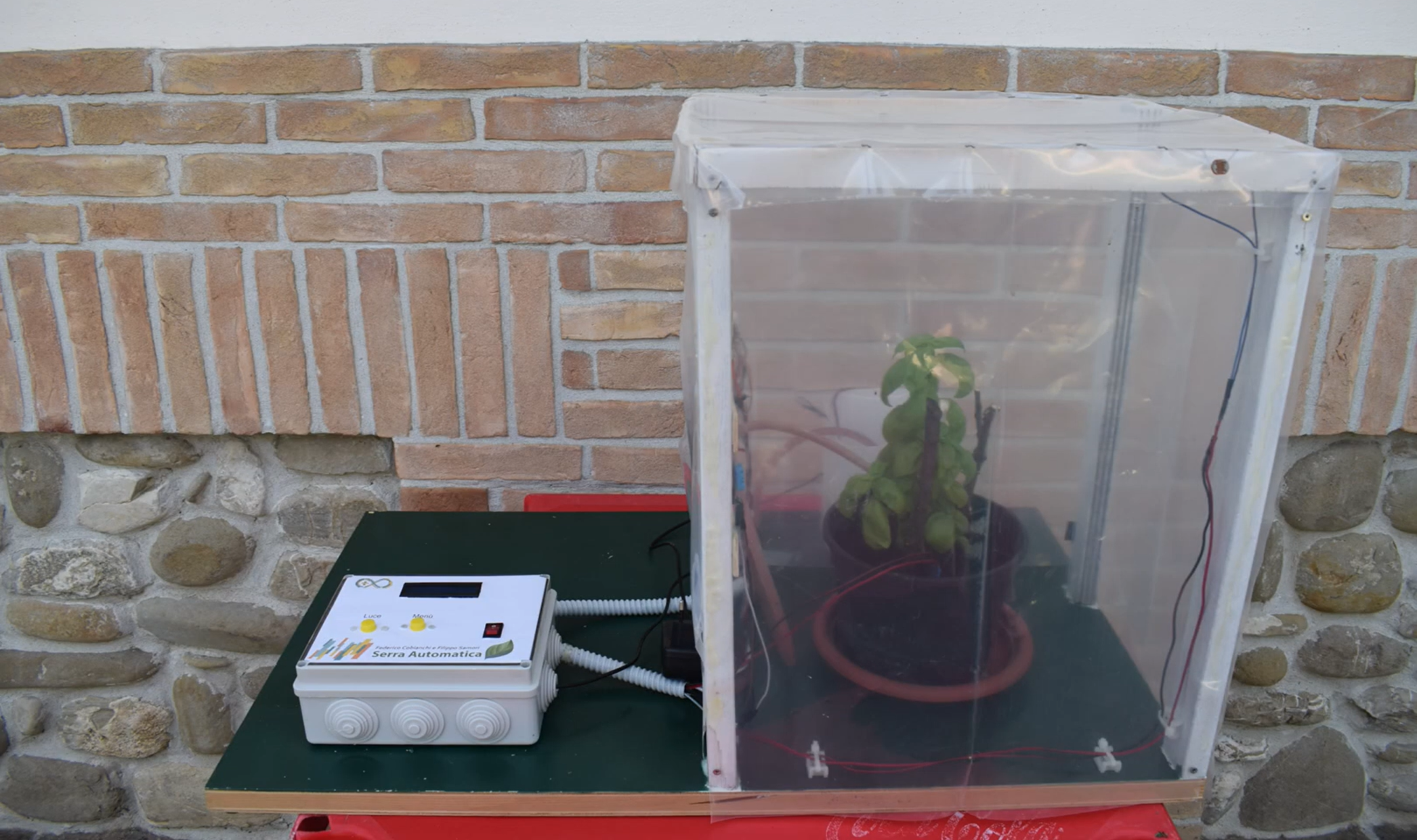
Project realized with my classmate Federico Cobianchi during our fourth year of high school. The project involved the development of a simple automatic greenhouse for a small plant. We used Arduino with various sensors to detect when the plant needed water.
View Project